ვიბირის მკითხველი





პოპულარული სტატისტიკა
| პარამეტრის დასახელება | ღირებულება |
| სტატიის თემა: | ლექცია No2. დარჩენილი გადაცემები. |
| კატეგორია (თემატური კატეგორია) | ავტო |
კვება, გამარჯვებები ლექციებში:
1. სათაურები პროგრამების შესახებ.
2. სარემონტო აღჭურვილობა.
| ზოგადი ინფორმაცია პროგრამების შესახებ. |
გადაცემაჩვენ nazivati's pristіy, ხელს ვაწერთ გადაცემაენერგია ერთი წერტილიდან ღია სივრცეში, როზტაშოვანუ პირველის დღეს.
მე გადავხედავ გადაცემული ენერგიის გადაცემის მხოლოდ მექანიკურ, ელექტრო, ჰიდრავლიკურ, პნევმატურ გადაცემის სიძნელეს.
მექანიკური ტრანსმისიაnazyvayut prist_y (მექანიზმი, ერთეული), განკუთვნილია ენერგიის გადაცემისთვის მექანიკურ რუხზე, როგორც წესი, yogo k_n-ის ხელახალი შექმნიდან ?? მათემატიკური და სიმძლავრის პარამეტრები და ზოგჯერ რუხის ძალიან ტიპი.
რა არის ყველაზე გავრცელებული ამოტრიალებული რუხის გადაცემის ტექნოლოგიაში, რომელიც არის მანქანის ნაწილების კურსში?? eno არის მთავარი პატივისცემა (გადაცემა ეფუძნება პატივისცემას, თუ არ არის შეჯამებული, თავად გადაბრუნებული რუხის გადაცემა).
კლასიფიკაციაგადაბრუნებული რუხის მექანიკური გადაცემათა კოლოფი:
1. რუკზე გადაცემის მეთოდისთვისშეყვანის ლილვიდან გამომავალზე:
1.1. გადარიცხვები დანართებზე:
1.1.1. ერთად bezposrednіm კონტაქტი tіl შეფუთვა - კბილები, ჭიები, gvintovі;
1.1.2. მოსაწყენი ხმით - ლანციუგოვი, კბილის შეკეთება.
1.2. ხახუნის მექანიზმები:
1.2.1. ერთად bezposrednіm კონტაქტი tіl შეფუთვა - ხახუნის;
1.2.2. საზიზღარი ხმით - reminnі.
2. ორმხრივად roztashuvannyu val_vკოსმოსში:
2.1. ლილვების პარალელური ღერძებით - გადაცემათა კოლოფი ცილინდრული ბორბლებით, ხახუნი ცილინდრული ლილვაკებით, ლანგრები;
2.2. ლილვების ჯვარედინი ღერძებით - გადაცემათა კოლოფი და ხახუნის ბოლოები, ხახუნის წილები;
2.3. ერთად perekhresnyh ღერძი - გადაცემათა კოლოფი - gunty და conoid, ჭია, წინა ხახუნის საწყისი ცვლილება როლიკებით.
3. kutovoy izvidkost izvidkosti vyhіdnogo ლილვის ცვლილების ბუნების უკან შეყვანის ცვლილების მიხედვით: შემცირება (დაწევა) და გამრავლება (მოძრავი).
4. გადაცემის (ნომრის) გადაცემის ხასიათის მიღმა:გადაცემები მუდმივი (არა უმნიშვნელო) გადაცემული კომუნიკაციებიდან და გადაცემები მინიმალური (მაგნიტუდით, ან პირდაპირ ან ერთბაშად) გადაცემული კომუნიკაციებიდან.
5. ვოსფსების ჩამონგრევისთვის ?? їy і valіv:გადაცემათა კოლოფი ლილვების უხეში ღერძებით - რიგები (გადაცემათა კოლოფი, გადაცემათა კოლოფი), გადაცემათა კოლოფი ლილვების უხეში ღერძებით (პლანეტარული გადაცემათა კოლოფი, ვარიანტები მბრუნავი ლილვაკებით).
6. რიგი ნაბიჯებისთვისრუხის ხელახალი შექმნა: ერთი, ორი, სამი და ბევრი ხელმისაწვდომობა.
7. კონსტრუქციული დიზაინისთვის:დახურვა და გახსნა (გარდასახული).
გადაცემის ძირითადი მახასიათებლები, რომლებიც აუცილებელია განვითარებისა და დიზაინისთვის, შემავალი და გამომავალი ლილვებზე შეფუთვის ძალისხმევისა და სიჩქარისთვის არის P in ,P vih ,w in ,w ერთად ... ტექნიკურ სიაში შეცვალეთ kutovnyy shvidkosti zvyvyuyut ლილვების სიხშირე და შეფუთვა - n-ში і n ერთად ... Spіvvіdnoshennya mіzh ხშირი შეფუთვა ნ(ზომა 1/hv) და kutoviy shvidkis ვ (ზომა SI 1/წმ)
დიფერენციალური დაძაბულობა მექანიზმის გამომავალი ლილვზეP vih (Brown pulling) გაყვანამდეP in , პიდვედენოი შესასვლელ ლილვამდე (ვიტრაჩენოი), გადაღებული ნაზივათი კოეფიციენტი Corinthy Diy (KKD):
დადგმა, რომელიც ჩართულია ძალისხმევის მექანიზმებში (მანქანები ?? ე).P in - P out ) ვურეკავ ფულის ღირებულება, რომელიც ჩანს ასეთ რანგში:
 (2.3)
(2.3)
Otzhe ჯამი kofіtsієntіv korinoy dії і vrat nd ?? ყოველთვის ყველაზე ძვირი:
ფართოზოლოვანი გადაცემისთვის, მათ შორის კბოლოს და ბოლოს ?? პირველი საფეხურებიდან, გარე KKD კარამდე მესამე საფეხურების დამატებითი KKD:
Otzhe KKD მანქანები, როგორ ვიძიოთ შურისძიება უამრავ ბოლო გადაცემაზე, და ?? ყოველთვის იყოს KKD be-ის მსგავსი z cikh გადაცემები.
ენერგიის გადაცემის ინდიკატორები ეფუძნება მექანიზმებისა და მანქანების თეორიის ფორმულებს (TMM):
zusillja, scho din რუხის ხაზის გასწვრივ დეტალების პროგრესირებად კოლაფსზე (მაგალითად, ამწე მექანიზმზე) F = P / v , დე პ - სიმტკიცე, სრული დეტალების გათვალისწინებით და ვ - її shvidkіst;
ანალოგიურად, გადაცემათა კოლოფი, გადაცემათა კოლოფი, გადაცემათა კოლოფი, მოქმედი მომენტი. T = P / w , დე პ - სიმტკიცე, მიტანილი tsiy shaft და ვ - თქვენი შეფუთვის სიჩქარე. Vikoristovuchi spіvіdnoshennya (2.1), ჩვენ მივიღებთ ფორმულას, როგორც მომენტს, მოზიდვის და შეფუთვის სიხშირეს:
![]() . (2.6)
. (2.6)
წრეწირი (წერტილი) სისწრაფე შესაფუთი ელემენტის (ბორბლები, ღვეული, ლილვი) მსგავს წერტილში, რომელიც დევს დიამეტრზე. დ მთელი ელემენტის მიწოდება მოხდება:
ფართო ტანგენციალებით (ან, თუ გარშემორტყმული ვარ, ან წერტილად), ძალა შეიძლება გამოითვალოს შემდეგი ფორმულის მიხედვით:
![]() . (2.8)
. (2.8)
გადატანილი ვიდნოსინი -გამავალი ლანკას სიჩქარის ცვლილების ფასი გამავალი ლანკას სიჩქარეზე, ასე რომ გადაბრუნებული რუხისთვის შეგიძლიათ გამოიყენოთ შემდეგი რანგი:
 , (2.9)
, (2.9)
de ზედა ნიშანი (პლუს) წააგავს შემავალი და გამომავალი ლანოკის (ლილვის) პირდაპირ შეფუთვას, ხოლო ქვედა - ვიზუალურს.
ამავდროულად, ტექნიკური როზრაჰუნკაში (განსაკუთრებით მიცნოსტში), იგი პირდაპირ არის გახვეული დ ?? მას არ აქვს დიდი მნიშვნელობა, ეს არ არის დიდი საქმე, მაგრამ ეს არ არის შესანიშნავი გადაცემაში. ასეთ როზრაჰუნკებს მოადგილე ჰყავთ გადაცემის ნომერი, ĸᴏᴛᴏᴩᴏᴇ є გადაცემის შესრულების აბსოლუტური მნიშვნელობა:
 . (2.10)
. (2.10)
გქონდეთ ბევრი წვდომა გასულ შაბათ-კვირას ხშირ გადაცემებზე კ ნაბიჯები (უფრო ხშირად, ტექნოლოგიაში სპონტანურია), გადაცემის ნომერი და გადაცემის გადაცემა იწყება შეურაცხმყოფელი ვირუსებით:
 .
(2.11)
.
(2.11)
ამობრუნებული რუხის უძლური და მრავალმხრივი მექანიზმების შუაგულში, მათი დასრულება შესაძლებელია მარტივი კონსტრუქციული (სტრუქტურის მიხედვით) - საზიზღარი ხმით, რობოტული ძალების პრინციპი დამოკიდებული იქნება გახეხვის ან დაკბილული გადაცემის მანკიერ ძალებზე. - მთელი აღჭურვილობა.
| სარემონტო აღჭურვილობა. |
ტრანსმისიის შეკეთება -მთელი მექანიზმი, დამატებითი ხახუნის ურთიერთკავშირის მიღმა ამობრუნებული კოლაფსის გადაცემის ნიშნები, ან დახშული დაბუჟებული რგოლის დაკბილული მიმაგრება - ქამარი მყარი ღერძებით - საბურავები, დამაგრებული შემავალ და გამომავალ ლილვებზე.
დარჩენილი გადაცემათა კოლოფი (ნახ. 2.1) ინახება ლილვაკებზე დარგული შკივის ორი ან მეტი დიდი ნაწილისგან, რომლებიც მონაწილეობენ ამობრუნებული რუფის გადაცემაში და საზიზღარი რგოლი, რომელსაც ქამარი ჰქვია, რადგან ვეძებ შკივს. შიკ-ის მეგზურით) და მათთან ერთად ძალების დასახმარებლად დაკბილული იმპლანტაციის გახეხვა.
ლექციის ძირითადი ნაწილი მიეკუთვნება ხახუნის გადაცემას, ტერმინიდან დაშორებასთან ერთად, რემინა გადაცემა, იმ შემთხვევაში, თუ ეს არ იქნება ახსნილი, განვიხილავთ თავად ხახუნის გადაცემას.
გრეტერებზე დარჩენილი გადაცემები გადაცემის ყველაზე ძველი და მარტივი ტიპია. ტრანსმისიები და დანიის საათში ცნობილია, რომ აღწევს ფართო სტაგნაციას, სუნი ფართოდ ჩერდება shvidkohidnyh shchablah drive-ზე (გადაცემის შეფუთვა ელექტროძრავებიდან ?? їy შეტევითი მექანიზმებისკენ). MGKM-ის შიდა წვის ძრავებში სარემონტო გადაცემათა კოლოფი ჩერდება დამხმარე დანადგარების (გულშემატკივარი, წყლის გაგრილების სისტემის ტუმბო, ელექტრო გენერატორი), ხოლო გადაცემათა ღვედის მექანიზმი ჩაჭედილია მანქანის ძრავებში. ბენზინის ძრავის ძრავა.
სარემონტო მექანიზმების კაპიტალური შეკეთება: 1. დიზაინის სიმარტივე და დაბალი ხარისხი. 2. როხზე გადაცემის შესაძლებლობა დიდ დისტანციებზე (15 მ-მდე). 3. რობოტების შესაძლებლობა შესანიშნავი შესრულებით. 4. რობოტის მეტი სიგლუვე და დაბალი ხმაური. 5. ტორსიული ვიბრაციებისა და პოზების რეგულირება ქამრის ზამბარის სიჩქარისთვის. 6. Zapobіgannya mechanizmіv іd perevantazhennya for rakhunok skidding ქამარი აბსოლუტური navantazhennyah.
არასრული სარემონტო მექანიზმები: 1. დიდი ზომის. 2. ქამრების დაბალი გადაადგილება. 3. დიდი განივი navantazhennya, რომლებიც გადაეცემა ლილვაკები და bearings. 4. გადაცემის ნომრის თანაფარდობა ქამრის ლიკვიდაციისთვის. 5. Visoka მგრძნობელობა გადაცემის ადრე სასმელი rіdin (წყალი, სროლა, ზეთები) ზედაპირზე rubbing.
ქამრების გადაცემის კლასიფიკაცია:
1. განივი ფორმისთვისქამარი: ბრტყელტერფიან(ღამრის განივი ცვლილება არის ბრტყელი გრეხილი მართკუთხედის ფორმა, სურ. 2.1.ა); კლინოს ქამრები(ქამარის გვერდითი ცვლილება ტრაპეციის სახით ნახ. 2.1.ბ); პოლიკლინიკური(ზედაპირზე გამოძახება ბრტყელია, ხოლო შიგნიდან, რომელიც ურთიერთშემცვლელია შქივამით, სარტყლის ზედაპირი დაცულია გვიანი სავარცხლებით, რომლებიც განივი განმეორებით გამოსახულია ტრაპეციის სახით ნახ. 2.1.დ); მრგვალი ქამრები(ღამრის განივი ცვლილება ქმნის ფსონის ფორმას ნახ. 2.1.B); დაკბილული ქამარი(ბრტყელი სარტყლის შიდა ზედაპირი დაცულია განივი სახელურებით, რომლებიც ჩართულია რობოტით გადაცემის პროცესში ბორბლების გარე ჩაღრმავებამდე).
2. ლილვისა და ქამრის ორმხრივი ვარდნის მიხედვით:ლილვების პარალელური გეომეტრიული ღერძებითა და სარტყლით ვიდკრიტიგადატანა (შკივი ერთ ძაფშია გახვეული); პარალელური ლილვებითა და ქამრით, რომელიც მონადირებს შკივის მოპირდაპირე ძაფებში - ხრაშუნატრანსფერი (shkіvi შემოხვევა გასართობ თასმებში); ლილვის ღერძი გადაკვეთილია დეიაკიმ კუტის ქვეშ (მეორე ?? იოგოს ნაწილი 90 °) - ნახევრად გადაჯვარედინებულიგადაცემა.
3. სკოლის რაოდენობისა და ტიპის მიხედვით,გადაცემაში დაკარგული: ს მარტოხელა სტუდენტებილილვები; ს დვუშკივნამილილვით, ერთი რულონი ერთი უსაქმური; ლილვებით, სკოლის საფეხურებიგადაცემათა კოეფიციენტის შესაცვლელად (ამძრავი ლილვის სიჩქარის საფეხურის რეგულირებისთვის).
4. რიგი ლილვებისთვის, რომლებიც ნადირობენ ერთი სარტყლით:ტყუპი ლილვი, ტრიოხ-, ჭოტირო- і მრავალ ლილვიგადაცემა.
5. დამატებითი ვიდეოების გამოჩენისთვის:დამატებითი ვიდეოების გარეშე, ს გაჭიმვალილვაკები; ს გიდებილილვაკები.
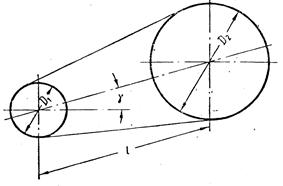
 Პატარა. 2.2. ღია უღელტეხილის გადაცემის გეომეტრია. Პატარა. 2.2. ღია უღელტეხილის გადაცემის გეომეტრია. |
გეომეტრიული გადასასვლელიიგი ჩანს მიწაზე ღია მექანიზმის კონდახზე (ნახ. 2.2). მეზოსი?? evoe vіdstan ა - ϶ᴛᴏ დგას ლილვების გეომეტრიულ ღერძებს შორის, რომლებზედაც დამაგრებულია შკივი დიამეტრით D 1 (Wien, როგორც წესი, є provid) і D 2 (ვედდენიი შქივი). როდესაც rozrakhunki klinorenyh ტრანსმისია წამყვანი და მამოძრავებელი shkіvіv vikoristovuyut rozrakhunkovі diametri d p1 і d p2 ... Kut mіzh gіlkami hunt shkіvi ქამრები - 2გრ , ხოლო კორპუსზე ნადირობენ პატარა (მავთულის) საჭრელი ქამრით a 1 ... საწყობის შიგნით ნახევრად გაჭრილი სავარძლიდან (სურ. 2.2) ჩანს იაკი
 ,
(2.12)
,
(2.12)
და რადგან იაკ ცეი კუტ ზზვიჩაი პატარაა, მაშინ ბაგათიოხ როზრახუნკში ვთქვათ є სიახლოვე. გ '' იმღერე, ტობტო
![]() .
(2.13)
.
(2.13)
Vikoristovuchi tse ჩაშუშული kut ნადირობა პატარა ღვედის ქამრით შეიძლება წარმოდგენილი იყოს შეურაცხმყოფელ ვიგლიადში
![]() (2.14)
(2.14)
რადიოს სამყაროში მაინც
 (2.15)
(2.15)
გრადუსებში.
თუ თქვენ გაქვთ გადაცემის სხვადასხვა პარამეტრი, შეგიძლიათ გამოიყენოთ ფორმულა
 . (2.16)
. (2.16)
ამავდროულად, ხშირად საჭიროა ქამრების დასრულება (სტანდარტული) დოჟინის დახურული წრის ხედში. ზოგადად vypadku vinyk რისი ნახვა გსურთ დავალებების მიხედვით? დრო
რობოტული ტრანსმისიების სტაბილურობის უზრუნველსაყოფად, დარწმუნდით, რომ აიღეთ
ბრტყელი ქამრისთვის ![]() ,
,
და სოლისთვის -,
დე სთ გვ - ქამრის განივი პერერების სიმაღლე (ქამარის სისქე).
რობოტული გადაცემის პროცესში ქამარი გამოიყენება შკივის გასატარებლად და შესანარჩუნებლად, რომელიც უფრო მოკლეა ვიდრე ქამარი (რაც ნაკლებია. L გვ ) І chim shvidshe vin collapse (chim more yogo shvidkist V გვ ), ტიმი უფრო მეტად დაუკავშირდება თავის სამუშაო ზედაპირს სკოლის ზედაპირთან და უფრო ინტენსიურია კონტაქტი. დაკისრების მიზეზით V p / L გვ (იოგოს ზომა სისტემაში CI - s -1) ახასიათებს ქამრის გამძლეობას მისი რობოტის მოცემულ გონებაში - რაც უფრო დიდია შესრულების ღირებულება, მით ნაკლებია ყველაზე გავრცელებული გონებისთვის ქამრის ხანგრძლივობა. დამირეკე აიღე
ბრტყელი ქამრებისთვის V p / L p = (3 ... 5) s 1,
სოლებისთვის - V p / L p = (20 ... 30) სთ 1.
ძლიერი შესრულება პასში. საჭირო გონებანორმალური რობოტები, იქნება ეს ხახუნის გადაცემა, მოიცავს რემონტს, - ნორმალური მანკიერების ძალების გამოვლინებას გახეხილ ზედაპირებს შორის. გამშვები მექანიზმის შემთხვევაში, მათ შეეძლოთ მხოლოდ წინა ქამრის დაჭიმვის გახსნა. არარეგულარული გადაცემის შემთხვევაში ორივე გილოკის დაძაბულობა იგივე იქნება (მნიშვნელოვნად їх F 0
, Yak სურათზე 2.3.a). რობოტული გადაცემის პროცესში ჩვენ მოვაშორებთ წინასწარ დატვირთვას დანიურ შკივზე, ქამრის მჭიდი ამოიღებს წინასწარ დატვირთვას (იგულისხმება დაძაბულობის ძალა F 1
), იმ საათში, აკოცე მეგობარს, ცბიერი წინა თხემიდან, ქამრის წვეტი მოიხსნება (її დაძაბულობის ძალა მნიშვნელოვანია. F 2
, დივ. ბრინჯი. 2.3.ბ). თოდი, ცხადია, გარშემორტყმულია ზუსილათი, რომელიც უფრო მტკიცედ არის გადაცემული, ალე მეორე მხრიდან, როგორც ნებისმიერი გადაცემისთვის, შეფუთვა ![]() (დივ. (2.8)), ხოლო თანდათანობით უხეში ქამრისთვის შესაძლებელია ჩაწეროთ, დე პ
- გადაცემის წნევა და V გვ
საშუალო კლასიქამრის დაცემა. ქამრის საკეტების მთლიანი დაჭიმულობა ხდება დაუმარცხებელი, როგორც რიგებში, ასე რომ, არაეფექტურ მექანიზმში, ტობტო
(დივ. (2.8)), ხოლო თანდათანობით უხეში ქამრისთვის შესაძლებელია ჩაწეროთ, დე პ
- გადაცემის წნევა და V გვ
საშუალო კლასიქამრის დაცემა. ქამრის საკეტების მთლიანი დაჭიმულობა ხდება დაუმარცხებელი, როგორც რიგებში, ასე რომ, არაეფექტურ მექანიზმში, ტობტო ![]() ... ალ ეილერის ფორმულისთვის ქამრისთვის,
... ალ ეილერის ფორმულისთვის ქამრისთვის, ![]() , De არის ბუნებრივი ლოგარითმის საფუძველი ( ე ''
2,7183), ვ
- სიმშვიდის ეფექტურობა (სითბოს ეფექტურობა) ქამარსა და შკივის მასალებს შორის (ცხრილი 2.1), ა
- kut ohoplennya ქამრით shk_va (განსაზღვრული ?? en vishche).
, De არის ბუნებრივი ლოგარითმის საფუძველი ( ე ''
2,7183), ვ
- სიმშვიდის ეფექტურობა (სითბოს ეფექტურობა) ქამარსა და შკივის მასალებს შორის (ცხრილი 2.1), ა
- kut ohoplennya ქამრით shk_va (განსაზღვრული ?? en vishche).
არ არის მნიშვნელოვანი ქამრის წინა დაძაბულობის ძალების ოპტიმალური მნიშვნელობის გამოსათვლელად ნაკლოვანების გამოკლება.
 , (2.18)
, (2.18)
და ზუსილის დარჩენილი, ადვილად გამოსაყენებელი ბიძგიდან მავთულის მექანიზმზე, (2.8-მდე),
 , (2.19)
, (2.19)
დე ინდექსი'' 1 '' იმუშავეთ იმ პარამეტრებზე, რომლებსაც ამძრავი ბორბალი უმკლავდება. თუ ქამრის წინა დაჭიმვის მნიშვნელობა შემცირდება უფრო მცირეთ ბუნებრივი ბრუნვის გამოსახულებასთან მიმართებაში (2.19), მაშინ ქამრის სრიალება (ლიკვნა) ხდება და ძალა გადადის წინა ლილვზე. , მნიშვნელობაზე გადასვლის აუცილებლობა თუ ცილინდრის წინა დაჭიმვის ძალა აღემატება ოპტიმალურ მნიშვნელობას, ეს უფრო მნიშვნელოვანია მოცემული დაძაბულობის გადაცემისთვის, მაშინ დაჭიმვის მზარდი ნაწილი გადაუგრიხეს ღვედის ზამბარაზე გადაცემათა კოლოფი, რომელიც ასევე ზრდის დაძაბულობას ქვედა KKD-მდე.
ანალოგიურად, დაძაბულობის ძალა წამყვანი ხელმძღვანელი
 . (2.20)
. (2.20)
დაძაბულობის ძალების დაძაბულობის მატება პრაქტიკული გადაცემის სარტყელში ძალების ჯამზე აღებულია ნაზივატით. წევის კოეფიციენტი (j) .
 . (2.21)
. (2.21)
წევის კოეფიციენტი ახასიათებს რობოტის გადაცემის ხარისხს. იოგო ოპტიმალურია, არ არის მნიშვნელოვანი ვიცოდე, vikoristovuchi viraz (2.18),
 . (2.22)
. (2.22)
იაკი ბოლო ვირაზიდან ჩანს ბიძგების ფაქტორის ოპტიმალური მნიშვნელობა არ არის დაწოლა გადაცემული ძალისხმევის გამო, ან ღვედის წინ დაჭიმვის გამო და მხოლოდ მასალების ხახუნის თანაბარი ძალის გამო, ქამრების და მექანიზმების დიზაინის გამო. და მათ პარამეტრებში... რიცხვითი მნიშვნელობები j 0 ქამრებისთვის іnіh მასალებისგან і kuta hopping ფოლადის წამყვანი საჭრელი ქამრით, ტოლია 180 °, წარმოდგენილია ცხრილში. 2.1.
| ცხრილი 2.1 შესრულება და წევის შესრულება ფოლადის თაიგულებზე ქამრების სხვადასხვა მასალისთვის. |
კინი ?? მათემატიკის ჩაბარება.იაკი ნაჩვენებია წამყვანი ქამრის თავის დაჭიმვის ძალაზე, არამედ ქამრის დაჭიმვის ძალაზე ( F 1 \ u003e F 2 ). Zvidsey viplivaє, არის წაგრძელებული?? ქამრის აღებული ელემენტის კანის მდგომარეობა იცვლება ამის შედეგად, მეორე მხრივ, ელემენტი მოიხმარება საათის მომენტში. ქამრის მთელი ელემენტარული ნაწილის ცვლილება მხოლოდ ღვედების გასწვრივ მოძრაობის პროცესში ჩანს. ამავდროულად, წამყვანი ბორბლის გასწვრივ (მავთულის თავიდან მავთულზე გადასვლისას) ეს არის ფეხით მოსიარულეთა ელემენტარული ნაწილი, ხოლო რუსეთის შემთხვევაში, მამოძრავებელი ბორბლის გასწვრივ (გადავლა მავთულის თავიდან მავთულიდან). ქამარი მავთულის თავთან) - მოხვედრა. Zmіna dozhini ქამრის ნაწილი, შესაძლებელია თასმის ზედაპირზე დაწებება, შესაძლებელია მხოლოდ ნაწილობრივი სრიალით. Vikladeni mirkuvannya საშუალებას გაძლევთ ჩამოაყალიბოთ სწავლების და ქამრის უსაქმურობის არაიდენტური ჩართულობის ორი ყველაზე ხელსაყრელი თანმიმდევრობა:
ლექცია No2. დარჩენილი გადაცემები. - გაიგე და ნახე. კატეგორიის კლასიფიკაცია და განსაკუთრებული მახასიათებლები „ლექცია No2. დარჩენილი გადაცემები“. 2014 წლის როკი, 2015 წელი.
Vykhіdni danі (otrimanі kіnematic rozrakhunku drive-დან):
ნ 1 - ამძრავის ლილვის დაჭიმვა;
ნ 1 - წამყვანი ლილვის შეფუთვის სიხშირე, ბრუნი / hv;
і- გავლის პასების რაოდენობა.
1. 4.3.1 ცხრილის მიხედვით, ქამრის ვიბრაცია ბრუნვის ოდენობით ეკიდება ამოძრავ ლილვზე:
თ 1 = 9555 ∙ 10 3 ∙, H ∙ მმ. (4.3.1)
shk_v_v დიამეტრი ქამრების ვიბრაციის დროს
| პერეტინის ქამარი | თ 1, N ∙ მმ | დწთ, მმ | პერეტინის ქამარი | თ 1, N ∙ მმ | დწთ, მმ |
| სოლი ნორმალური გადინება | სოლი უნივერსიტეტები | ||||
| შესახებ | 30 ∙ 10 3-მდე | UO | 150 ∙ 10 3-მდე | ||
| ა | 15∙10 3 …60∙10 3 | UA | 90∙10 3 …400∙10 3 | ||
| ბ | 50∙10 3 …150∙10 3 | UB | 300∙10 3 …2∙10 6 | ||
| ვ | 120∙10 3 …600∙10 3 | HC | პონადი 1.5 ∙ 10 6 | ||
| გ | 450∙10 3 …2,4∙10 6 | პოლიკლინოვი | |||
| დ | 1,6∙10 6 …6∙10 6 | მანამდე | 40 ∙ 10 3-მდე | ||
| ე | პონადი 4 ∙ 10 6 | ლ | 18∙10 3 …400∙10 3 | ||
| მ | პონადი 130 ∙ 10 3 |
2. ვიბრირეთ პატარა ბორბლის დიამეტრი.
რობოტის მექანიზმების რესურსის რეგულირებით, რეკომენდებულია როტორის დიამეტრის უმცირესი მექანიზმების დაყენება. დ 1 >დწთ (div.ცხრილი 4.3.1) სტანდარტული მწკრივიდან: 63, 71, 80, 90, 100, 112, 125, 140, 160, 180, 200, 224, 250, 280, 315, 305, 500, 560, 630, 710, 800, 900, 1000, 1 120, 1250, 1400, 1600, 1800, 2000., 2240, 2500, 2800, 450, 3500.
3. ვიზუალურად დიამეტრი დიდი shkіva d2 = d1і. დამრგვალეთ d2 მნიშვნელობა უახლოეს სტანდარტულ მნიშვნელობამდე.
4. დააზუსტეთ მოცემული ანგარიშის ანგარიშების გადაცემის ნომერი
ξ ≈ 0.01
ხილვადობა і 'მოცემულისაგან і: Δ і= | і - і '|.
5. ჩაატარეთ ტესტი ∙ 100% ≤ 5%:
· თუ umova არ არის vikonutsya, მაშინ გადადით მე-3 წერტილში და ვიბრირეთ სხვა მნიშვნელობა სტანდარტული მწკრივიდან;
6. ორგანიზაციის ხილვადობა არ არის მნიშვნელოვანი
a'= cd 2, de kofіtsієnt ვიბრაცია 4.3.2 ცხრილების მიხედვით გადაცემის ნომრის თანდასწრებით і.
ცხრილი 4.3.2
შესრულების ღირებულება ს
| і | ||||||
| ს | 1,5 | 1,2 | 0,95 | 0,9 | 0,85 |
7. Viznachiti oriєntovnaya ღირებულება გენეზის ქამარი:
 . (4.3.3)
. (4.3.3)
GOST 1284.1-89, GOST 1284.2-89, GOST 1284.3-96 ქამრებისთვის ნორმალური ზერეტინისთვის, RTM51-15-15-70 ქამრებისთვის ვუზიკის ზერეტინისთვის და ვიკორისტისთვის.
RTM 38-40528-74 პოლი-სოლი ქამრებისთვის ვიბრირებს ყველაზე ახლოს სტანდარტული ქამრების გადახურვასთან (ნახ. 4.3.1, ცხრილი 4.3.3).

ცხრილი 4.3.3
ქამრების სტანდარტული დამხობის ზომა (მმ)
| აღნიშვნა peretinu | როსრაჰუნკოვის სიგანე ლ გვ | სიგანე ვ | ვიზოტა თ 0 | როზრახუნკოვა დოვჟინა L გვ | ვ | |
| ნაიმენშა | ყველაზე | |||||
| შესახებ | 8,5 | |||||
| ა | ||||||
| ბ | 10,5 | |||||
| ვ | 13,5 | |||||
| გ | ||||||
| დ | 23,5 | |||||
| ე |
რიგი rosary dovzhin beliv L p,მმ: 400; (425); 450 (475); 500 (530); 360 (600); 630; (670); 710; (750); 800, (850); 900; (950); 1000; (1060); 1120 (1180); 1250; (1320); 1400; (1500); 1600; (1700) 1800; (1900 წ.); 2000; (2120); 2240; (2360); 2500; (2650); 2800; (3000); 3150 (3350); 3550; (3750); 4000; (4250); 4500 "(4750); 5000; (5300); 5600, (6000); 6300; (6700); 7100.
Rosemiri in თაღები vicoristovuvati ტექნიკურად rimmed vipads.
8. მიუთითეთ საცხოვრებელი ადგილი:
დე ∆ 1 = 0,5π (დ 1 + დ 2) 2 ; ∆ 2 = 0,25π (დ 2 – დ 1) 2 .
9. ქამრის სიხშირე:
M/s, აქ დ 1 მმ (4.3.5)
10. ვიზუალურად, ქამრების ნიმუშების რაოდენობა v წამში:
აქ ლმ-ში (4.3.6)
11. გადახედეთ უღელტეხილის გადაცემას სანდოობაზე ტესტების რაოდენობაზე v ≤ [v], de [v] = 10s-1:
· თუ უმოვა არ ვიკონუცია, გადადით მე-8 პუნქტზე და შეადგინეთ ქამარი სტანდარტის მიხედვით;
· Yakshcho umova vikonutsya, წასვლა შეტევითი rozrahunku.
12. ვიზნაჩიტი კუტის ღვედი პატარა თასმის ქამრით:
![]() . (4.3.7)
. (4.3.7)
13. ჩაატარეთ ხელახალი გამოთვლა α ≥ 120 °: თუ არ გსურთ დანახვა, მაშინ უნდა დააფიქსიროთ დანართი, გაზარდოთ წრე, მაგალითად, დაჭიმვის როლიკერი; თუ umova უნდა იყოს გამარჯვებული, მაშინ გადადით შეტევითი ბლოკისკენ.
14. ვიზუალურად შემოვხაზავ ძალას თასებზე:
15. ვიზუალურად დაყენებული ქამრების რაოდენობა არ არის მნიშვნელოვანი:
V- ქამრებისთვის ვირაზის უკან:
პოლი-სოლი ქამრებისთვის, ვირუსის უკან ქამრის ნეკნების რაოდენობა იწყება:
დე [ კ] = კ 0 z a z r- დასაშვები corisne დაღვრა; ა 1 , ა 10 - ქამრების განივი გადაფარვის ადგილები (ცხრილი 4.3.1.3); კ 0 - ქამრის შტრიხის კორიზნე, მპა;
ჩვეულებრივი სოლი და პოლი სოლი ქამრებისთვის:
 ; (4.3.11)
; (4.3.11)
მაღალი დონის სოლი ქამრებისთვის:
დე V -ქამრის სიჩქარე, მ/წმ, (დივ. პუნქტი 9); v -ღვედის სიხშირე, (დივ. პუნქტი 10); b p -ქამრის სიგანე ნეიტრალური ბურთის გასწვრივ (დივ. ცხრილი. 4.3.4); k i -კოეფიციენტი გადაცემის კოეფიციენტში (დივ. ცხრილი 4.3.5); s α - kofіtsієnt, scho vrakhovuє ინექციური კუტას გარსი წევის შენობაზე (ცხრილი. 4.3.6); ზ პ -ეფექტურობა რობოტის რეჟიმისთვის (ცხრილი 4.3.7). ხელახლა ინსტალაცია სავიზო დაწყების დაწყებისას
∙ 100% (დივ. გრაფიკი navantazhennya ტექნიკურ ქარხანაში).
ცხრილი 4.3.4
ამძრავი სოლისა და პოლისოლის ქამრების ზომა
| ქამრის პარამეტრები | ქამრის ტიპი | ||||||
| ნორმალური პერეტინი | |||||||
| O (Z) | ᲐᲐ) | B (C) | B (C) | G (D) | D (E) | ე | |
| А 1, А 10, მმ 2 | |||||||
| ბ სთ, მმ | 8,5 | ||||||
| გ,კგ / მ | 0,06 | 0,10 | 0,18 | 0,30 | 0,60 | 0,90 | 1,52 |
| [ზ] | |||||||
| ქამრის პარამეტრები | ქამრის ტიპი | ||||||
| ვუზკი | პოლიკლინოვი | ||||||
| UO (SPZ) | დიახ (SPA) | UB (SPB) | HC (SPC) | K (J) | A (L) | M (K) | |
| А 1, А 10, მმ 2 | |||||||
| ბ სთ, მმ | 8,5 | 2,4 | 4,8 | 9,5 | |||
| გ,კგ / მ | 0,07 | 0,12 | 0,2 | 0,37 | 0,09 | 0,45 | 1,6 |
| [ზ] | |||||||
| შენიშვნა: ISO ქამრები მითითებულია ტაძრებზე. |
ცხრილი 4.3.5
კოეფიციენტები გადაცემის კოეფიციენტში კ ი
ცხრილი 4.3.7
კოეფიციენტი რობოტის რეჟიმისთვის ს რ
GOST 1284.3-80-ში და RTM 38.40545-79-ში შეუძლებელია პოზიციის შეცვლა მრავალძალიან გადაცემათა კოლოფში. ქამრების რაოდენობის შესაყვანად ზ ზ(ცხრილი 4.3.8). ქამრების დარჩენილი რაოდენობა:
ღირებულება ზდამრგვალეთ მთელი რიცხვი უფრო დიდი მიმართულებით.
ცხრილი 4.3.8
ქამრების რაოდენობა ზ ზ
16. ტესტის ჩატარება ზ≤[ზ], დე [ ზ] - ქამრების დასაშვები რაოდენობა მოცემული გადაბრუნებისთვის (განცალკევებული ცხრილი 4.3.4):
· თუ წინააღმდეგი არ ხართ, გადადით მე-2 პუნქტზე და ვიბრირეთ უფრო დიდ ზომაზე, შემდეგ კი გაიმეორეთ ქამრის ზომა;
· Yakshcho umova vikonutsya, გადადით შეტევითი ბლოკისკენ.
17. Viznachiti ძლიერი მხარეები, scho go on wali:
![]() , (4.3.14)
, (4.3.14)
დე ა 1 - ერთი სარტყლის განივი გადაფარვის არე, პოლი-სოლი ქამრებისთვის
(დივ. ცხრილი 4.3.4); კ 0 - დარიჩინის დაღვრა ქამარში (დივ. გვ. 15);
γ = 180 ° – α – kut mіzh gіlkami ქამრები (kut ა -იხილეთ პუნქტი 12).
დარჩენილი გადაცემები ხორციელდება გრეიტერებზე გადაცემამდე (ხახუნი), რომლებშიც ძალისხმევის გადაცემაა საჭირო ბადეების ძალებისთვის, მაგრამ ისინი აღიარებულია წამყვან, სახედ და სამრეწველო ლანკას შორის - ზამბარის ქამარი (მომწყენი ხმა).
პროვიდნეს და ლანკას უწოდებენ "შკივამს". მექანიზმის მთელი ტიპი გამოყენებული იქნება ერთი ტიპის მნიშვნელობების გადასატანად.
ნორმალური რობოტული პასიური გადაცემისთვის აუცილებელია ღვედის წინასწარ მოჭიმვა, რადგან შეიძლება საჭირო გახდეს ერთ-ერთი გადაცემათა კოლოფის გადაადგილება, დაჭიმვის ლილვაკები ან ძრავის (მექანიზმის) დაყენება ცხელ ფირფიტაზე.
დარჩენილი მექანიზმები კლასიფიცირდება სხვადასხვა ნიშნის მიხედვით - ღვედის განივი ცვლილების ფორმის გამო, ლილვებისა და ღვედის გამოცვლის მიხედვით, გადაცემათა რაოდენობისა და ტიპის მიხედვით, ქამრების რაოდენობის მიხედვით. ქამრის, გზის მიხედვით
1. განივი ქამრის ფორმისთვის razr_znyayut გადაცემის შეურაცხმყოფელი ტიპები:
მეტი საცავი მანქანაში სოლისა და პოლიკლინის ქამრებისთვის. გადაცემათა კოლოფი მრგვალი რეზინის ქამრით (დიამეტრი 3 ... 12 მმ)ჩერდება დისკებში მცირე ძალისხმევით (სხვათა შორის, უბრალოდ ჩაიცვით, მანქანის გზაზე და ა.შ.).
პასიური გადაცემის სახეობა არის გადაცემათა ღვედი, რომელშიც ძალისხმევის გადაცემა ხდება დაკბილული ღვედით სამუშაოდ, ღვედის კბილების სასტვენებით საბურავებზე დამაგრების გზა. გადაცემათა მთელი ტიპი არის შუალედურ გადაცემათა კოლოფებსა და ღეროების გადაცემებს შორის. გადაცემათა ღვედის გადაცემათა კოლოფი არ არის ძალიან მნიშვნელოვანი ქამრის წინა დაჭიმვის წინ და არც ისე მოკლეა, როგორც ქამრის დაჭიმვა, რომელიც მიმაგრებულია ქამრის ყველა სხვა გადაცემათა კოლოფზე.
V-ქამარი გადაცემის მთავარ zasosovyat yak vіdkritu. ასასვლელი მექანიზმები შეიძლება გამოყენებულ იქნას მეტი წევისთვის, ნაკლები დაძაბულობისთვის, მათთვის, ვისაც ნაკლები სჭირდება ლილვების საყრდენის დამაგრება, მიეცით ნაკლები წრე, რათა მოხდეს მათი ჩაკეტვა დიდი გადაცემის დროს.
სოლი და პოლიკლინიკური ქამრები განუსაზღვრელი და აწეულია. navantazhennya ატარებს კაბელს ან იკეცება სფერული ქსოვილის ბურთულად.
სოლი ღვედები აწარმოებენ სამ ტიპს: ნორმალური გადინება, მაღალი და ფართო. ფართო ქამრები ფიქსირდება ცვლადში.
პოლი-სოლი ღვედები - ბრტყელი ღვედები მაღალი ხარისხის კაბით და შიდა გვერდითი სოლით, რომლებიც ხვდებიან ღარებში. უფრო დახშული სუნი, ნაკლები სოლი, უფრო ლამაზად გადამცემი ნომრის ფოლადი.
ბრტყელ ქამრებმა შეიძლება გამოიწვიოს ბევრი ჩხვლეტა, მაგრამ არა ღვედის მნიშვნელოვანი წინა დაჭიმვა. უფრო მეტიც, ბრტყელი ქამარი არც ისე ხისტია ბორბლებზე, როგორიცაა სოლი ან პოლი-სოლი.
2. ლილვისა და სარტყლის ორმხრივი ვარდნის მიხედვით :

3. სკოლის რაოდენობისა და ტიპისთვის , Scho სტაგნაცია გადაცემათა კოლოფში: ერთლილოვანი ლილვებით; ორმაგი ლილვით, ერთი ერთი ლილვით; ლილვებიდან, რომლებიც ატარებენ შკივის კვანძებს გადაცემათა კოეფიციენტის შეცვლისთვის (ამძრავი ლილვის შვიდკოსტის ტუბარხიანი რეგულირებისთვის).
4. რიგი ლილვებისთვის, რომლებიც ნადირობენ ერთი სარტყლით : ორლილოვანი, სამ ლილვის, chotiroh- და მრავალ shaft გადაცემათა კოლოფი.
5. დამატებითი ვიდეოების გამოჩენისთვის : დამატებითი ლილვაკების გარეშე, დაჭიმვის ლილვაკები (ნახ. 2e); გასასწორებელი ლილვაკებით (ნახ. 2დ).
გადაცემის ხელახალი გაყვანამდე გაიცემა შემდეგი უფლებამოსილებები:
ქამრების გადაცემის ძირითადი ნაკლოვანებები:
დარჩენილი გადაცემათა კოლოფი იბლოკება უამრავ შემთხვევაში ელექტროძრავიდან ან შიდა წვის ძრავიდან ხელზე გადასაცემად,  თუ, კონსტრუქციული სამყაროების მიხედვით, მიჟოსოვა დამნაშავეა დიდად და გადაცემული რიცხვი შეიძლება არ იყოს მკაცრად მუდმივი (კონვეიერები, მოიტანეთ ვერსტატები, საგზაო და სასოფლო-სამეურნეო მანქანები და ა.შ.)... დაკბილული ქამრით გადაცემა შეიძლება გამოყენებულ იქნას დისკებში, რომელიც შეიძლება დარეგულირდეს გადაცემათა კოეფიციენტის მუდმივ მნიშვნელობაზე.
თუ, კონსტრუქციული სამყაროების მიხედვით, მიჟოსოვა დამნაშავეა დიდად და გადაცემული რიცხვი შეიძლება არ იყოს მკაცრად მუდმივი (კონვეიერები, მოიტანეთ ვერსტატები, საგზაო და სასოფლო-სამეურნეო მანქანები და ა.შ.)... დაკბილული ქამრით გადაცემა შეიძლება გამოყენებულ იქნას დისკებში, რომელიც შეიძლება დარეგულირდეს გადაცემათა კოეფიციენტის მუდმივ მნიშვნელობაზე.
სარემონტო ხელსაწყოებით გადატანის სურვილი, დარეკეთ 50 კვტ, ალე შეგიძლია მიაღწიო სიმძლავრე 2000 კვტდა ნავი მეტი. ქამრის სიჩქარე v = 5 ... 50 მ / წმ, ხოლო მაღალსიჩქარიან მექანიზმებში - მდე 100 მ/წმდა ვიშჩე.
გადაცემათა კოლოფის ტრანსმისია ყველაზე ფართოდ არის გაფართოვებული საუკეთესო მექანიკური ტრანსმისიებიდან. ხშირად არ იქნება გამარჯვებული გარკვეული ტიპის პროგრამებში.
მიჟოსოვამ პასი დაინახა დიზაინი აპარატის წამყვანის ძირითად დიზაინში. საერთაშორისო ეკონომიკის რეკომენდირებული ღირებულება (დივ. სურ. 3):
ბრტყელკბილიანი მექანიზმებისთვის:
a ≥ 1,5 (D 1 + d 2);
გასაღების გარეშე და მრავალღამიანი გადაცემისთვის:
a ≥ 0,55 (D 1 + d 2) + სთ;
de:
d 1, d 2 - ამოძრავებული და ამოძრავებული მექანიზმების დიამეტრი;
თ - ქამრის სიმაღლე.
როზრახუნკოვა დოვჟინა ქამარი L გვ კარიბჭეები სწორი ხაზებისა და რკალების ჯამია ბორბლების გარშემო:
L p = 2 a + 0,5 π (d 2 + d 1) + 0,25 (D 2 - d 1) 2 / ა.
სტანდარტული მწკრივიდან ცნობილი მნიშვნელობების მიხედვით, აიღეთ საუკეთესო დიდი როსრაჰუნკოვისთვის ქამარი L p. როცა არის 30 ... 200 მმ.

მიჟოსოვა პასში ნახეს დარჩენილი დადგენილი პერიოდისთვის, დაიწყეთ ფორმულის დაცვით:
a = [ 2 L p - π (d 2 + d 1)] / 8 + √{[ 2 L р - π (d 2 + d 1)] 2 - 8 π (d 2 - d 1) 2) / 8 .
წვრილი ღვედი პატარა თასმის ქამრით
α 1 = 180 ° - 2 γ .
ტრიციკლიდან დაახლოებით 1 VO 2(ნახ. 3)
sin γ = VO 2 / О 1 О 2 = (d 2 - d 1) /2 ა.
პრაქტიკულად γ არ ტრიალებს π / 6 , რაზეც შეგვიძლია ავიღოთ sin γ = γ (რად), ანუ:
γ = (d 2 - d 1) / 2 a (რად) ან γ ° = 180 ° (d 2 -d 1) / 2 πa.
უკვე,
α 1 = 180 ° - 57 ° (d 2 - d 1) / ა.
გადაცემის გავლა:
u = i = d 2 / d 1 ( 1 – ξ) ,
de: ξ არის გადაცემის ეფექტურობა, რომელიც ნორმალური რობოტული მოძრაობის შემთხვევაში ξ = 0.01 ... 0.02.
მიახლოებით შესაძლებელია u = d 2 / d 1 მიღება; ξ = (v 1 -v 2) / v 1.
მექანიზმს, რომელიც წარმოადგენს ორ ლილვზე დამაგრებული დამხმარე სარტყლის უკან შემოხვევის კარგ გადატანას (შკ_ვახ) და მათ შორის უსიამოვნო ხმის დავიწყებას, ეწოდება "ერთ-ერთი მათგანის მიერ გადმოწევის პროცესის შეკეთება. დენის წევის ტიპების მოხუცები.
vikoristovuvanoy stitchka-ს ტიპის გამო, რემინის ტრანსმისია შეიძლება იყოს მრგვალი, ბრტყელი, დაკბილული მართკუთხა ან სოლი ფორმის ქამარი. მასალები, საიდანაც შეიძლება იყოს ქამრის ვიკონანის ხაზი, სარეკლამო ნივთების დასასრულებლად: შკირა, ბავოვნიან ტილო და ა.შ.
ბოძის პრინციპი შეტევაში: є ორი ლილვი და წამყვანი ქამარი, მათ შორის დაჭიმვა. ლილვს, რომელიც გადადის შესასვლელით, ჰქვია გამტარი ლილვი, ხოლო მას, რომელზეც მოდის ბიძგი, ხორციელდება. ხაზის ის ნაწილი, როგორც ის მიდის წამყვან ღერამდე, არის დიდი დაძაბულობა, მაგრამ არა მანამ, სანამ led ათრევა. Otzhe, პასიური გადაცემა - განსხვავება საფეხურში ერთი ქამრის ორი ნაწილის შებოჭილობამდე. ქარხანა არის ინდიკატორი, შესაძლებელია ამძრავის მექანიზმის ბიძგის ეფექტურობის გაზრდა.

თუმცა, აქ არის მთელი რიგი თავისებურებები. მაგალითად, ქამრის დაჭიმვის სიდიდე არის დამნაშავე იმაში, რომ მუდმივად იზრდება მოცემულ საზღვრებში, ზომის ცვლილების ნამსხვრევებმა შეიძლება გამოიწვიოს უღელტეხილის ხაზის გახეთქვა და ზედმეტად სუსტი დაძაბულობა, ნაპაკი, მიიყვანს ქამრის ჩამოხრჩობა, შეგიძლიათ დალიოთ. მთავარი ფუნქცია, როგორიცაა vikon, reminna გადაცემა, ზარის მელოდია ელექტროძრავის ორ ლილს შორის ყოველგვარი მყარი კავშირების გარეშე. ამავე დროს, საათის დროს, იგი გადაიცემა, თუმცა, ზუსილას ღირებულებისთვის.
როგორც კი შეძლებთ დიდ დროს მიაღწიოთ, ნარჩენი გადაცემა შეიძლება მიაღწიოს ნიშნულს Tse-ს ზომამდე, ქამრის გაჭიმვა і, როგორც მემკვიდრეობა, დაქვეითება. გარდა ამისა, ზოგიერთ სიტუაციაში შეგიძლიათ შეამოწმოთ შენახვის ნაწილები, რადგან (მათი მცირე ზომის გამო) ნაკლები სივრცე იქნება.

საშვის გადაცემის KKD იწყება შეტევითი წოდებით. საჭიროა ძლიერად დაძაბვა, გასასვლელში მისი მოშორება, ბიძგზე გადანაწილება და მერე მოვიდა ჯიუტად და 100%-ით გაამრავლა ფიგურა. დარჩენილი ტრანსმისია ასევე შეიძლება ხასიათდებოდეს შეყვანის მნიშვნელობით, რადგან აუცილებელია ზეწოლის დაყენება წამყვანი ლილვზე.
დაბალი სიჩქარის დარჩენილი გადაცემა, დაბალი სიგლუვეს, მასტიკის ხილვადობა, ინსტალაციის სიმარტივე და іnshі. ნაკლოვანებები - მნიშვნელოვანი ზომები, ლიკვიდაცია, ნდობის ნაკლებობა და დაბალი სისულელე აშენება.
გაუმჯობესებულია უღელტეხილის გადაცემის პროდუქტიულობა, ისევე როგორც ლიკვიდაციის ძალა. დანიური პარამეტრი არის დაწოლა ჭრილიდან წრეში და ნაბიჯი ქამრის დაჭიმვამდე.
კუტ ობყვათუ - ცენტრალური კუტი, რომელიც აჭიმავს რკალს, დამონტაჟებულია სარტყლისა და შქივის ნაწილებში.
გადაცემათა კლასიფიკაცია.გადამცემი სარტყლის განივი გადაფარვის ფორმიდან ჩამოცვენილია: ბრტყელ-გადაგდების, ცინ-ღვედი, მრგვალ-ღვედები, პოლიკლინი-ღვედები (სურ. 69). ბრტყელი გადაცემის მექანიზმები rostashuvannyu-ზე იქნება ჯვარედინი და ნახევრად ჯვარი (kutovі), ნახ. 70. თანამედროვე აპარატს აქვს ყველაზე მეტი სოლი და პოლიკლინიკური ქამარი. გადაცემათა კოლოფი მხოლოდ მრგვალი ქამრით შეიძლება დამონტაჟდეს (საკერავი მანქანები, სხვათა შორის, ჩაიცვით).
ტიპიური უღელტეხილის გადაცემა є დაკბილული ქამარი, შო გადაიცემა ქამარის შკივამით დამაგრების გზით.

Პატარა. 70. იხილეთ ბრტყელტერფიანი მექანიზმები: ა - პერეხრესნა, ბ - ნახევრად გადაჯვარედინებული (კუტოვა)
დასაფასებელია. დარჩენილი გადაცემათა კოლოფი გადაეცემა მექანიკურ გადაცემათა კოლოფს, რომელიც უხდება უსიამოვნო ხმით და ჩერდება, როდესაც საჭიროა მათი გადატანა ლილვებს შორის, რომლებიც ამოღებულია მნიშვნელოვან სადგურებზე და როდესაც გადაცემამდე დიდი დრო რჩება. დარჩენილი ტრანსფერი ინახება წამყვანი და ამოძრავებული შქივიდან, roztasvanih on deyakіy vіdstanі ერთი ერთიდან და იგივე ღვედიდან (ებ), ჩაიცვით შკივი ჩარევით. პროვოკაციული შკივის შეფუთვა გარდაიქმნება მართვადი გრეტერის შეფუთვაში, ისე რომ ვითარდება ქამარსა და შკივს შორის. განივი ხელახალი გამოყენების ფორმისთვის ბინა , სოლი , პოლიკლინოვი і მრგვალი წამყვანი ღვედები. Razrіznyayut ბრტყელი გადაცემის მექანიზმები - ვიდკრიტი , Yakі zdіysnyuut გადატანა პარალელურ ლილვებს შორის, შემოახვიეთ ერთი მიმართულებით; პერსნი, Yakі zdіysnyuut ტრანსმისია პარალელურ ლილვებს შორის ვ კუტოვიხი (ნახევრად გადაკვეთა) შკივის როზთაშოვანის ბრტყელი გადაცემათა კოლოფი პერეხრეს (ზაზვიჩაი სწორ ჭრილზე) ლილვებზე. ღვედისა და სარტყელს შორის ღვედის დასამაგრებლად გახსენით ღვედის დაჭიმულობა წინა ზამბარის დეფორმაციის წინ ჭიშკრით, ერთ-ერთი გადაცემათა გადაცემის საშუალებით, დამატებითი დაჭიმვის ლილვაკისთვის (ქამარი).
პერევაგი. გადამცემი ქამრების ელასტიურობის მენეჯერები მუშაობენ შეუფერხებლად, დარტყმის გარეშე და უხმაუროდ. სუნი ინარჩუნებს ქამრების ახალგაზრდული ლპობის დროს გადატვირთულობის მექანიზმს. ბრტყელი გადაცემათა კოლოფი ჩერდება დიდი საშუალო ზომის სავარძლებით და როცა მაღალი ღვედის სიჩქარე მაღალია (100-მდე Ქალბატონი). როდესაც არის მცირე ინტერდისციპლინარული ხედები, შესანიშნავი გადამცემი გადაცემები და გადაცემები, ერთი წამყვანი შკინიდან მრავალ უფრო ლამაზად კლასიკურ გადაცემამდე. გადაცემის მინიმალური ფასი. ინსტალაციისა და სერვისის სიმარტივე.
არასრული. გადაცემის დიდი ზომები. ტრანსმისიის შეცვლა ქამრის ლიკვიდაციით. დამონტაჟებულია ლილვების საყრდენზე შკივამით. დაჭიმვის ქამრებისთვის დანართების საჭიროება. ქამარი უმნიშვნელო გამძლეობა.
სფერო zasosuvannya. ბრტყელი გადაცემის ტრანსმისია უფრო მარტივია, მაგრამ კლინორენაია შეიძლება მორგებული იყოს წევის შენობაზე და მოერგოს მცირე ზომებს.
პოლი-სოლი ღვედები - ბრტყელი ღვედები სამუშაო ზედაპირზე გვერდითი სოლი ფორმის ნეკნებით, ისე რომ შედიან სოლიების ღარებში. ქამრების რაოდენობა, რომლებიც ემორჩილება ბრტყელი ქამრების გამძლეობას - სიმტკიცე და სოლი - ზრდის შიმბის მგრძნობელობას.
მრგვალი ქამარიანი გადაცემათა კოლოფი გამოიყენება მცირე ზომის მანქანებისთვის, მაგალითად, სამკერვალო და კვების მრეწველობის მანქანები, კედელზე დამაგრებული ვერსტატები, ასევე სხვა დანართები.
სარემონტო მექანიზმების სიმტკიცის გამო, ის ჩერდება ახალ მანქანებში და ერთეულებში 50-ზე კვ T, (5000-მდე სიჩქარით კვტ), წრეწირის სიჩქარით - 40 Ქალბატონი, (ნებისმიერ პროგრამაში 100-მდე Ქალბატონი), გადაცემათა კოლოფის 15 ნომრების მიხედვით, KKD გადაცემათა კოლოფი: ბრტყელი 0,93 ... 0,98, და კლინო-ღვედები - 0,87 ... 0,96.

Პატარა. 71 გადაცემის დიაგრამა.
ძალისმიერი როზრაჰუნოკი . მიმდებარე ძალა პროვინციულ შკივზე
 . (12.1)
. (12.1)
სარემონტო მექანიზმების როტორი პასუხისმგებელია როზრახუნკოვის მიმდებარე ძალებზე, რობოტის გადაცემის I რეჟიმში დინამიური რეგულირების ეფექტურობის გამო:
დე - დინამიური ინსტალაციის ეფექტურობა, რომელიც მიღებულია = 1 დაბალ ინსტალაციაზე, = 1.1 - ახალი ოფციონების რაოდენობა, = 1.25 - ახალი ოფციონების რაოდენობა, = 1.5 - ახალი ოფციონების რაოდენობა.
ქამრის დაჭიმულობა ქამარზე ფ O (წინ დაძაბულობის) მიიღოს ასეთი, ისე, რომ აუცილებელია მიიღოს დაძაბულობის მიღწევა ტრივიალური საათი, თუ დიდი რაინდები და არ მოიხმარენ საჭირო დამატებითი დაძაბულობა. ბრტყელი სტანდარტული ქამრებისთვის ავტომატური დაჭიმვის მიმაგრების გარეშე = 1.8 მპა; ავტომატური დაჭიმვებით = 2 მპა; სტანდარტული V- ქამრებისთვის = 1.2 ... 1.5 მპა; პოლიამიდური ქამრებისთვის = 3 ... 4 მპა.
პოჩატკოვას დაჭიმვის ქამარი დაჭიმვა
დე A -ბრტყელი გადაცემის ქამრის განივი გადაფარვის არე ან კლინორემიული გადაცემის ყველა სარტყლის განივი გადაფარვის არე.
გააძლიერე სწავლების სიმკაცრე მე ვხედავ ს 2 ღვედის შეცვლა დამაგრებულ მექანიზმში ჩანს მექანიზმის თავიდან (სურ. 72).

Პატარა. 72. სქემა ძალა rozrahunku გადაცემის.
გარეცხეთ წამყვანი შქივის მცველები
 (12.4)
(12.4)
urahuvannyam-ით (12.2) მავთულზე არის ძალა
ტყვიის თავის შებოჭილობა
 , (12.6)
, (12.6)
გამოყენებული გილკას შებოჭილობა
 . (12.7)
. (12.7)
ვიზა ამძრავის საბურავის ლილვზე
 . (12.8)
. (12.8)
მავთულის დაჭიმვის ძალებსა და გორგლის საცხოვრებელ ნაწილს შორის შეფერხება ახლოსაა ეილერის ფორმულის დასაწყისთან, მაგრამ დაძაბულობის გამო, ეს არის საზიზღარი, არამიმზიდველი, გაუწელავი ძაფი, ასე რომ ბარაბანი შეკრული იქნება. დაცემულთან ერთად
De - kofіtsієnt rubbing შორის ქამარი და shkіvom, - kut to წრეწირის shkіva.
ჩავუნისა და ფოლადის ქამრებისთვის ბადეების კოეფიციენტის საშუალო მნიშვნელობა შეიძლება მივიღოთ: ჰუმანური ქამრებისთვის = 0,35, ქამრებისთვის = 0,22 და დამატებითი და გარე ქამრებისთვის = 0,3.
როდესაც ფორმულაში გამოყენებულია სოლით ამოძრავებულ ტრანსმისიაში ხახუნის ძალა, შეცვალეთ - ეფექტურობა, გაწურვის აუცილებლობა, რათა უზრუნველყოს მიმართულება, სოლი ქამრებისთვის გახეხვის ეფექტურობა.
 , (12.10)
, (12.10)
დე - ქამრის სოლის გაჭრა.
ქამრისთვის მიმართული ძალა spіvvіdnoshen სპეციალური ხედვით, მე ადვილად გარს შემოვუვლი ძალას ქამრით.
![]() , (12.11)
, (12.11)
De - kofіtsієnt წევა, რომელიც დაფუძნებულია ნაყოფზე
პროვინციულ სკოლაზე რაიონული შეჩერების გაზრდა შეიძლება მიღწეული იყოს ქამრის წინა დაჭიმვის გაზრდით, ან წევის ფუნქციის კორექტირებით, რომელიც გადადის ჭრის გაზრდიდან ქამრის დაჭერამდე.
ქამრების მახასიათებლების შესახებ წინასწარ არსებული მონაცემების ცხრილებში მითითებულია წევის საჭირო შესრულების მოთხოვნების სპეციფიკაციები.
გეომეტრიული ფორმა . ქამრების როზრახუნკოვა დოვჟინა სახლში მოსახლეობის შუა რიცხვებში და შკივის დიამეტრი (მცირე 71):
დე. გამძლეობის ქამრებისთვის საკმარისია სტანდარტული საღებავების გამოყენება GOST-ის შესაბამისად. გეომეტრიული ფორმის ჩვენების მიზნით, დიაგრამა ნაჩვენებია ნახ.73-ზე.

სურ. 73. გადასასვლელი მექანიზმის გეომეტრიული ფორმის სქემა
ბრტყელი ან კლინორემიული ტრანსმისიის ნარჩენი ინსტალაციისთვის, ხდება ტრანსმისიის ცვლილება.
Rozrakhunkovі ფორმულები გარეშე urahuvannya sagging და cob დეფორმაციის ქამარი.
ატარეთ წამყვანი თასმის გარშემოწერილობა ქამრით რადიანებში:
 , (12.14)
, (12.14)
გრადუსებში  .
.
პროექტის ანგარიშის გაცემის პროცედურა.პროექტის დიზაინის დროს უღელტეხილის გადაცემისთვის, მოცემული პარამეტრების მიხედვით (წნევა, მომენტი, ჭრილი, სიჩქარე და გადაცემა) იწყება ღვედისა და ამძრავი ბორბლის შეცვლა, რადგან ეს არ უზრუნველყოფს საჭირო შესრულებას. მიზეზის კრიტერიუმი მაქსიმუმ KKD-ზე. გეომეტრიული ფორმისგან წამყვანი თაიგულის შერჩეული დიამეტრისთვის იწყება შემდეგი ზომები: ![]()
ბრტყელი გადაცემის დაგეგმვის დიზაინიწევის ნაგებობით, როტაცია დასაშვები კორის დატვირთვის მიხედვით , Yake დაიწყება მოსახვევების უკან. შედეგი არის ქამრის სიგანე ფორმულის მიხედვით:
 , (12.15)
, (12.15)
დე - წრეწირის ძალა გადაცემაში; - დასაშვები პიტომის წრეწირის ძალა, რომელიც შეესაბამება მაქსიმალური ბიძგების ეფექტურობას, რომელიც იწყება ქამრის სიჩქარით = 10 მ/წმ და გარშემოწერილობით = 1800; - კუტიდან ცენტრების ხაზამდე ჰორიზონტალურ ხაზამდე გადაცემის ვარდნის კოეფიციენტი: = 1.0, 0.9, 0.8 კუტისთვის ნახილამდე = 0 ... 600, 60 ... 800, 80 ... 900; - koofіtsієnt კუტა შკივას გარსამდე; - shvidkіsny kofіtsієnt :; - kofіtsієnt რობოტის რეჟიმში, რომელიც მიღებულია: = 1.0 spokіyna navantazhennya; = 0,9 navantazhennya მცირე ცვლილებებით, = 0,8 - navantazhennya s დიდი kolyvannya, = 0,7 - navantazhennya s მცირე ცვლილებები.
ემპირიული ფორმულების წინ რხევისთვის ენიჭება წამყვანი თაიგულის დიამეტრი
 , (12.16)
, (12.16)
დე - წნევა გადადის კვტ-ში, არის შეფუთვის სიხშირე.
წამყვანი თაიგულის დიამეტრი უნდა იყოს მომრგვალებული უახლოეს სტანდარტამდე.
მიღებულია ქამრის ტიპი, რომლისთვისაც დასაშვები პიტომა არის წრეწირის ძალა 12.1 ცხრილის მიხედვით.
ცხრილი 12.1
მოარგეთ როზრახუნკოვის სარტყლის სიგანე უახლოეს სტანდარტულ სიგანემდე ცხრილის მიხედვით 12.2.
ცხრილი 12.2 ბრტყელი წამყვანი ქამრების სტანდარტული სიგანე
|
20, 25,32, 40, 50, 63, 71, 80, 90, 110, 112, 125, 140, 160, 180, 200, 224, 250, 280… |
|
|
30, 60, 70, 115, 300… |
ცხრილი 12.3 ბრტყელი უღელტეხილის რგოლის სიგანე.
სოლი გადაცემის მექანიზმიწევის შენობის მიხედვით, ისინი ბრუნავენ ერთი სარტყლის მიერ მოპირდაპირე განივი ზედაპირზე გადაცემული დასაშვები სიძლიერის მიხედვით, რადგან ის ასევე იწყება მოსახვევების უკან. შედეგად, იქნება მთელი რიგი ვიბრაციული შემცვლელი ქამარი ფორმულის მიხედვით:
|
დ 1, მმ |
Р0 (კვტ) ქამრის სიჩქარეზე υ, მ/წმ |
||||||
|
ლ 0 = 1320 მმ |
|||||||
|
ლ 0 = 1700 მმ |
|||||||
|
ლ 0 = 2240 მმ |
|||||||
|
ლ 0 = 3750 მმ |
|||||||
|
ლ 0 = 6000 მმ |
სისტემის გადანაცვლება და V- ქამრების გადახურვის მნიშვნელობა GOST 1284-ის მიხედვით საერთაშორისო სტანდარტებში: Pro - Z, A - A, B - B, B - C, G - D, D - E, E - E0
1120; 1180; 1250; 1320; 1400; 1500; 1600; 1700; 1800; 1900; 2000; 2120; 2240; 2360;2500
2650; 2800; 3000; 3150; 3350; 3550; 3750; 4000
4250; 4500; 4750; 5000; 5300; 5600; 6000
6300; 6700; 7100; 7500; 8000; 8500; 9000; 9500; 10000; 10600
სოლი ქამრების რაოდენობა მრგვალდება უახლოეს დიდ რიცხვამდე.
გადანაწილება დამშვიდებისთვის . ქამრის საიმედოობა უნდა იყოს გამოყენებული, როგორც საყრდენი, ამავე დროს, ციკლური ჩანაცვლების შემთხვევაში. ამის დადგენა არის გზაზე ციკლების რაოდენობა, რადგან ის იზრდება ცხოვრების და ასაკის ცვლილების შემთხვევაში ცვლილებებისგან. ქამრის საიმედოობის უზრუნველსაყოფად 1000 ... 5000 წლის ინტერვალებში, რობოტი შეცვლის ქამრების რაოდენობას წამში, რაც იგივეა, რაც წამში გაშვების რაოდენობა.

ცხრილი 12.7
სოლი ქამრების ზომები და პარამეტრები
|
დანიშნულება |
გადინება, მმ |
ფ, მმ2 |
|||||||||
|
ნორმალური გადინება |
|||||||||||
| 4.1 5-დან 7 ხმის საფუძველზე | |||||||||||
| სტატისტიკა თემებზე: | |
|
ხედვის სკოლა. ვიპრობუვანო დამოუკიდებლად. იაკ, რომ სხვის ადგილას უსახსროდ დაინახო? იაკ ცხოვრება პენის გარეშე ნამდვილად კონდახით
მათ მოიპარეს გროშები და დოკუმენტები. კარგი, კარგი - ბუ. ახლა ჩვენ არ ვართ ... ცვლილების მიზეზები: მემკვიდრეობა და მსგავსება
დაავადების განვითარების ნიშნები დაავადების ქრონიკული ფორმა ტრივიალურობა და ... Virazki on mov: რა არის მოგება?
იყავი ლიუდინის მსგავსი ისეთი მიუღებელი გამოვლინებით, როგორიც არის ვირაზკი, ინოდი... | |




